The Boost Graph Library (BGL)
Graphs are mathematical abstractions that are useful for solving many types of problems in computer science. Consequently, these abstractions must also be represented in computer programs. A standardized generic interface for traversing graphs is of utmost importance to encourage reuse of graph algorithms and data structures. Part of the Boost Graph Library is a generic interface that allows access to a graph's structure, but hides the details of the implementation. This is an open interface in the sense that any graph library that implements this interface will be interoperable with the BGL generic algorithms and with other algorithms that also use this interface. The BGL provides some general purpose graph classes that conform to this interface, but they are not meant to be the only graph classes. There certainly will be other graph classes that are better for certain situations. The main contribution of the The BGL is the formulation of this interface.
Generic programming is the methodology that was used in the construction of the Boost Graph Library. To understand the organization and structure of the BGL, the reader needs a good understanding of generic programming.
Note The Boost Graph Library is a header-only library and does not need to be built to be used.
Genericity in the Boost Graph Library
Just as with STL's genericity, there are three ways in which the BGL is generic.
- Algorithm/Data-Structure Interoperability
-
First, the graph algorithms of the BGL are written to an interface that abstracts away the details of the particular graph data-structure. Like the STL, the BGL uses iterators to define the interface for data-structure traversal. There are three distinct graph traversal patterns: traversal of all vertices in the graph, through all of the edges, and along the adjacency structure of the graph (from a vertex to each of its neighbors). There are separate iterators for each pattern of traversal.
This generic interface allows template functions such as
breadth_first_search()to work on a large variety of graph data-structures, from graphs implemented with pointer-linked nodes to graphs encoded in arrays. This flexibility is especially important in the domain of graphs. Graph data-structures are often custom-made for a particular application. Traditionally, if programmers want to reuse an algorithm implementation they must convert/copy their graph data into the graph library's prescribed graph structure, which severely limits the reuse of graph algorithms.In contrast, custom-made (or even legacy) graph structures can be used as-is with the generic graph algorithms of the BGL, using external adaptation, which consistes of wrapping a new interface around a data-structure without copying and without placing the data inside adaptor objects. The BGL interface was carefully designed to make this adaptation easy.
- Extension through Visitors
-
Second, the graph algorithms of the BGL are extensible. The BGL introduces the notion of a visitor, which is just a function object with multiple methods. In graph algorithms, there are often several key event points at which it is useful to insert user-defined operations. The visitor object has a different method that is invoked at each event point. The particular event points and corresponding visitor methods depend on the particular algorithm. They often include methods like start_vertex(), discover_vertex(), examine_edge(), tree_edge(), and finish_vertex().
- Vertex and Edge Property Multi-Parameterization
-
The third way that the BGL is generic is analogous to the parameterization of the element-type in STL containers, though again the story is a bit more complicated for graphs. We need to associate values (called
properties
) with both the vertices and the edges of the graph. In addition, it will often be necessary to associate multiple properties with each vertex and edge; this is what we mean by multi-parameterization. The STLstd::list<T>class has a parameter T for its element type. Similarly, BGL graph classes have template parameters for vertex and edgeproperties
. A property specifies the parameterized type of the property and also assigns an identifying tag to the property. This tag is used to distinguish between the multiple properties which an edge or vertex may have. A property value that is attached to a particular vertex or edge can be obtained via a property map. There is a separate property map for each property.Traditional graph libraries and graph structures fall down when it comes to the parameterization of graph properties. This is one of the primary reasons that graph data-structures must be custom-built for applications. The parameterization of properties in the BGL graph classes makes them well suited for re-use.
Getting started with the Boost Graph Library
Introduction
The Boost Graph Library is a header-only library that requires no separate compilation.
All that is usually required is to set the location of the additional include directories in your integrated development environment (IDE) and you're ready to go. In Microsoft Visual Studio for example, just set the location of the Boost Library path in C/C++ > General > Additional Include Directories.
If you are developing in a Linux-based environment and have already installed Boost, there is good chance you don't need to do anything else.
Shortcuts to examples covered in this boost graph library tutorial are as follows:
- Creating a Simple Directed/Undirected Graph
- Adding Edges
- Constructing a Graph Using Edge Iterators
- Creating a Graph with some Property (such as Edge-Weight)
- Printing Edge (Internal) Properties (Weights)
- Printing Edge (Internal) Properties (Weights) (Complex)
- Accessing the Indeces for Edges (or Vertices)
- Print Edge Weights by means of
boost::property_map
Creating a Simple Directed/Undirected Graph
The first thing you probably need to learn coding-wise, is the use of the adjacency list to create the graph edge connections. It's probably worthwhile getting used to making liberal use of typedefs, given that Boost library declarations can end up somewhat lengthy.
To typedef an adjacency list for a directed graph:
typedef boost::adjacency_list< boost::vecS, boost::vecS, boost::directedS> DirectedGraph;
Just two remarks:
- The first and second template parameters selects the actual containers for the structures holding the edges and vertices in the graph respectively. Common choices are
vecSforstd::vectorandlistSforstd::list. For more choices see Boost Container Selectors. - The third parameter selects the directed-ness of the graph. The available tags are
undirectedS,directedSandbidirectionalS, which means directed and with in-edges.
Adding Edges
Given a graph object g of user-defined type Graph:
typedef boost::adjacency_list< boost::listS, boost::vecS, boost::directedS> DirectedGraph; DirectedGraph g;
We add edges by repeatedly calling non-member function boost::add_edge(src, target, graph_object) as in:
boost::add_edge (0, 1, g);
boost::add_edge (0, 3, g);
boost::add_edge (1, 2, g);
boost::add_edge (2, 3, g);
boost::add_edge (3, 1, g);
boost::add_edge (1, 3, g);
boost::add_edge (1, 4, g);
boost::add_edge (4, 5, g);
boost::add_edge (2, 5, g);
Note that ...
Constructing a Graph Using Edge Iterators
we have shown how the add_vertex() and add_edge() functions can be used to create a graph. Those functions add vertices and edges one at a time, but in many cases one would like to add them all at once. To meet this need the adjacency_list graph class has a constructor that takes two iterators that define a range of edges. The edge iterators can be any InputIterator that dereference to a std::pair of integers (i, j) that represent an edge in the graph. The two integers i and j represent vertices where 0 ≤ i < |V | and 0 ≤ j < |V |. The n and m parameters say how many vertices and edges will be in the graph. These parameters are optional, but providing them improves the speed of graph construction. The graph properties parameter p is attached to the graph object. The function prototype for the constructor that uses edge iterators is as follows:
template <var class='type'name EdgeIterator>
adjacency list(EdgeIterator first, EdgeIterator last,
vertices_size_type n = 0, edges_size_type m = 0,
const GraphProperties& p = GraphProperties())
The following code demonstrates the use of the edge iterator constructor to create a graph. The std::istream iterator is used to make an input iterator that reads the edges in from the file. The file contains the number of vertices in the graph, followed by pairs of numbers that specify the edges. The second default-constructed input iterator is a placeholder for the end of the input. The std::istream iterator is passed directly into the constructor for the graph.
std::ifstream file_in("makefile-dependencies.dat");
typedef graph_traits<file_dep_graph>::vertices_size_type size_type;
size_type n_vertices;
file_in >> n_vertices; // read in number of vertices
std::istream iterator<std::pair<size_type, size_type> > input_begin(file_in), input_end;
file_dep_graph g(input_begin, input_end, n_vertices);
Since the value type of the std::istream iterator is std::pair, an input operator needs to be defined for std::pair.
namespace std {
template <var class='type'name T>
std::istream& operator>>(std::istream& in, std::pair<T,T>& p) {
in >> p.first >> p.second;
return in;
}
}
Creating a Graph with some Property (such as Edge-Weight)
Suppose we wish to build the following weighted directed graph:
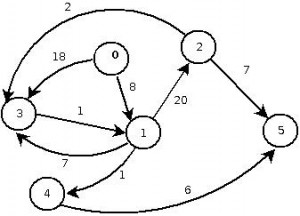
We can do this by making repeated calls to boost::add_edge(src, target, w, graph_object) to create the graph, where w occurs just before the graph object parameter and adds some property (weight) to the edge.
#include <boost/graph/adjacency_list.hpp>
#include <iostream>
typedef boost::property<boost::edge_weight_t, int> EdgeWeightProperty;
typedef boost::adjacency_list<
boost::listS,
boost::vecS,
boost::directedS,
boost::no_property,
EdgeWeightProperty > DirectedGraph;
int main()
{
DirectedGraph g;
boost::add_edge (0, 1, 8, g);
boost::add_edge (0, 3, 18, g);
boost::add_edge (1, 2, 20, g);
boost::add_edge (2, 3, 2, g);
boost::add_edge (3, 1, 1, g);
boost::add_edge (1, 3, 7, g);
boost::add_edge (1, 4, 1, g);
boost::add_edge (4, 5, 6, g);
boost::add_edge (2, 5, 7, g);
// ...
return 0;
}
Note the following points:
- We defined type EdgeWeightProperty (an arbitrary name) in order to use it to define type DirectedGraph. Its template parameters indicate that it is a edge property of type
int. - The fourth and fifth parameters set the vertices and edges' properties (that is, some kind of node or edge content) respectively
- These parameters default to
boost::no_property - Since we have defined the fifth parameter, we also have to define the fourth, and since we want no vertex property we set it to
boost::no_property.
Printing Edge (Internal) Properties (Weights)
In this section we shall extend the previous example. The additional code is printed in bold face.
We shall be using the following elements for the first time:
boost::property<tag, type>to typedef a new type (as inboost::property<boost::edge_weight_t, int>)boost::graph_traits<my_graph_type>::edge_iteratorto obtain the type of an edge iteratorboost::edges(my_graph_type)to obtain a pair of edge iterators (begin and end)- edge iterators dereference to
my_graph_type::edge_descriptor's
#include <boost/graph/adjacency_list.hpp>
#include <algorithm> // std::copy
#include <iterator> // std::ostream_iterator
#include <iostream>
typedef boost::property<boost::edge_weight_t, int> EdgeWeightProperty;
typedef boost::adjacency_list<
boost::listS,
boost::vecS,
boost::directedS,
boost::no_property,
EdgeWeightProperty > DirectedGraph;
typedef boost::graph_traits<DirectedGraph>::edge_iterator edge_iterator;
int main()
{
DirectedGraph g;
boost::add_edge (0, 1, 8, g);
boost::add_edge (0, 3, 18, g);
boost::add_edge (1, 2, 20, g);
boost::add_edge (2, 3, 2, g);
boost::add_edge (3, 1, 1, g);
boost::add_edge (1, 3, 7, g);
boost::add_edge (1, 4, 1, g);
boost::add_edge (4, 5, 6, g);
boost::add_edge (2, 5, 7, g);
std::pair<edge_iterator, edge_iterator> ei = edges(g);
std::cout << "Number of edges = " << num_edges(g) << "\n";
std::cout << "Edge list:\n";
for (edge_iterator it = ei.first; it != ei.second; ++it )
{
std::cout << *it << std::endl;
}
std::cout << std::endl;
return 0;
}
Printing Edge (Internal) Properties (Weights) (Complex)
In this section we shall use some new elements instead of just
for (edge_iterator it = ei.first; it != ei.second; ++it )
{
std::cout << *it << std::endl;
}
as used in the previous section.
The new code is printed in bold face.
We shall be using the following element(s) for the first time:
- edge descriptors are printed to an
std::ostreamby means ofstd::copy()andstd::ostream_iterator<edge_descriptor>
#include <boost/graph/adjacency_list.hpp>
#include <algorithm> // std::copy
#include <iterator> // std::ostream_iterator
#include <iostream>
typedef boost::property<boost::edge_weight_t, int> EdgeWeightProperty;
typedef boost::adjacency_list<
boost::listS,
boost::vecS,
boost::directedS,
boost::no_property,
EdgeWeightProperty > DirectedGraph;
typedef boost::graph_traits<DirectedGraph>::edge_iterator edge_iterator;
int main()
{
DirectedGraph g;
boost::add_edge (0, 1, 8, g);
boost::add_edge (0, 3, 18, g);
boost::add_edge (1, 2, 20, g);
boost::add_edge (2, 3, 2, g);
boost::add_edge (3, 1, 1, g);
boost::add_edge (1, 3, 7, g);
boost::add_edge (1, 4, 1, g);
boost::add_edge (4, 5, 6, g);
boost::add_edge (2, 5, 7, g);
std::pair<edge_iterator, edge_iterator> ei = edges(g);
std::cout << "Number of edges = " << num_edges(g) << "\n";
std::cout << "Edge list:\n";
std::copy(ei.first,
ei.second,
std::ostream_iterator<boost::adjacency_list<>::edge_descriptor>{
std::cout, "\n"});
std::cout << std::endl;
return 0;
}
Print Edge Weights by means of boost::property_map
You may obtain the mapping between edges and their respective weights by using the boost_property_map. Look at the last section of the code listing, highlighted in bold face.
#include <iostream>
#include <boost/graph/graph_traits.hpp>
#include <boost/graph/adjacency_list.hpp>
typedef boost::property<boost::edge_weight_t, double> EdgeWeight;
typedef boost::adjacency_list<boost::listS, boost::vecS, boost::directedS, boost::no_property, EdgeWeight> DirectedGraph;
typedef boost::graph_traits<DirectedGraph>::edge_iterator edge_iterator;
int main(int, char*[])
{
UndirectedGraph g;
boost::add_edge(0, 1, 8, g);
boost::add_edge(0, 5, 2, g);
boost::add_edge(5, 6, 1, g);
boost::add_edge(4, 5, 5, g);
boost::add_edge(3, 5, 7, g);
boost::property_map<DirectedGraph, boost::edge_weight_t>::type EdgeWeightMap = get(boost::edge_weight_t(), g);
std::pair<edge_iterator, edge_iterator> edgePair;
for (edgePair = edges(g); edgePair.first != edgePair.second; ++edgePair.first)
{
std::cout << *edgePair.first << " " << EdgeWeightMap[*edgePair.first] << std::endl;
}
return 0;
}
Note instead of boost::edge_weight_t(), which constructs a boost::edge_weight_t object, you can use object boost::edge_weight.
A Quick Tour of the Boost Graph Library
The domain of graph data structures and algorithms is in some respects more complicated than that of containers. The abstract iterator interface used by STL is not sufficiently rich to encompass the numerous ways that graph algorithms may traverse a graph. Instead, we formulate an abstract interface that serves the same purpose for graphs that iterators do for basic containers (though iterators still play a large role). The figure below depicts the analogy between the STL and the BGL.
In the following sections we will use the BGL to construct this example graph and manipulate it in various ways. The complete source code for this example can be found as BGL_quick_tour.cpp. Each of the following sections discusses a slice of this example file. Excerpts from the output of the example program will also be listed.
//=======================================================================
// Copyright 1997, 1998, 1999, 2000 University of Notre Dame.
// Authors: Andrew Lumsdaine, Lie-Quan Lee, Jeremy G. Siek
//
// Distributed under the Boost Software License, Version 1.0. (See
// accompanying file LICENSE_1_0.txt or copy at
// http://www.boost.org/LICENSE_1_0.txt)
//=======================================================================
#include <boost/config.hpp>
#include <iostream> // for std::cout
#include <utility> // for std::pair
#include <algorithm> // for std::for_each
#include <boost/utility.hpp> // for boost::tie
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/graphviz.hpp>
using namespace boost;
template <class Graph> struct exercise_vertex {
exercise_vertex(Graph& g_, const char name_[]) : g(g_),name(name_) { }
typedef typename graph_traits<Graph>::vertex_descriptor Vertex;
void operator()(const Vertex& v) const
{
using namespace boost;
typename property_map<Graph, vertex_index_t>::type
vertex_id = get(vertex_index, g);
std::cout << "vertex: " << name[get(vertex_id, v)] << std::endl;
// Write out the outgoing edges
std::cout << "\tout-edges: ";
typename graph_traits<Graph>::out_edge_iterator out_i, out_end;
typename graph_traits<Graph>::edge_descriptor e;
for (boost::tie(out_i, out_end) = out_edges(v, g);
out_i != out_end; ++out_i)
{
e = *out_i;
Vertex src = source(e, g), targ = target(e, g);
std::cout << "(" << name[get(vertex_id, src)]
<< "," << name[get(vertex_id, targ)] << ") ";
}
std::cout << std::endl;
// Write out the incoming edges
std::cout << "\tin-edges: ";
typename graph_traits<Graph>::in_edge_iterator in_i, in_end;
for (boost::tie(in_i, in_end) = in_edges(v, g); in_i != in_end; ++in_i)
{
e = *in_i;
Vertex src = source(e, g), targ = target(e, g);
std::cout << "(" << name[get(vertex_id, src)]
<< "," << name[get(vertex_id, targ)] << ") ";
}
std::cout << std::endl;
// Write out all adjacent vertices
std::cout << "\tadjacent vertices: ";
typename graph_traits<Graph>::adjacency_iterator ai, ai_end;
for (boost::tie(ai,ai_end) = adjacent_vertices(v, g); ai != ai_end; ++ai)
std::cout << name[get(vertex_id, *ai)] << " ";
std::cout << std::endl;
}
Graph& g;
const char *name;
};
int main(int,char*[])
{
// create a typedef for the Graph type
typedef adjacency_list<vecS, vecS, bidirectionalS,
no_property, property<edge_weight_t, float> > Graph;
// Make convenient labels for the vertices
enum { A, B, C, D, E, N };
const int num_vertices = N;
const char name[] = "ABCDE";
// writing out the edges in the graph
typedef std::pair<int,int> Edge;
Edge edge_array[] =
{ Edge(A,B), Edge(A,D), Edge(C,A), Edge(D,C),
Edge(C,E), Edge(B,D), Edge(D,E), };
const int num_edges = sizeof(edge_array)/sizeof(edge_array[0]);
// average transmission delay (in milliseconds) for each connection
float transmission_delay[] = { 1.2, 4.5, 2.6, 0.4, 5.2, 1.8, 3.3, 9.1 };
// declare a graph object, adding the edges and edge properties
#if defined(BOOST_MSVC) && BOOST_MSVC <= 1300
// VC++ can't handle the iterator constructor
Graph g(num_vertices);
property_map<Graph, edge_weight_t>::type weightmap = get(edge_weight, g);
for (std::size_t j = 0; j < num_edges; ++j) {
graph_traits<Graph>::edge_descriptor e; bool inserted;
boost::tie(e, inserted) = add_edge(edge_array[j].first, edge_array[j].second, g);
weightmap[e] = transmission_delay[j];
}
#else
Graph g(edge_array, edge_array + num_edges,
transmission_delay, num_vertices);
#endif
boost::property_map<Graph, vertex_index_t>::type
vertex_id = get(vertex_index, g);
boost::property_map<Graph, edge_weight_t>::type
trans_delay = get(edge_weight, g);
std::cout << "vertices(g) = ";
typedef graph_traits<Graph>::vertex_iterator vertex_iter;
std::pair<vertex_iter, vertex_iter> vp;
for (vp = vertices(g); vp.first != vp.second; ++vp.first)
std::cout << name[get(vertex_id, *vp.first)] << " ";
std::cout << std::endl;
std::cout << "edges(g) = ";
graph_traits<Graph>::edge_iterator ei, ei_end;
for (boost::tie(ei,ei_end) = edges(g); ei != ei_end; ++ei)
std::cout << "(" << name[get(vertex_id, source(*ei, g))]
<< "," << name[get(vertex_id, target(*ei, g))] << ") ";
std::cout << std::endl;
std::for_each(vertices(g).first, vertices(g).second,
exercise_vertex<Graph>(g, name));
std::map<std::string,std::string> graph_attr, vertex_attr, edge_attr;
graph_attr["size"] = "3,3";
graph_attr["rankdir"] = "LR";
graph_attr["ratio"] = "fill";
vertex_attr["shape"] = "circle";
boost::write_graphviz(std::cout, g,
make_label_writer(name),
make_label_writer(trans_delay),
make_graph_attributes_writer(graph_attr, vertex_attr,
edge_attr));
return 0;
}
Constructing a Graph
In this example we will use the BGL adjacency_list class to demonstrate the main ideas in the BGL interface. The adjacency_list class provides a generalized version of the classic adjacency list data structure. The adjacency_list is a template class with six template parameters, though here we only fill in the first three parameters and use the defaults for the remaining three. The first two template arguments (vecS, vecS) determine the data structure used to represent the out-edges for each vertex in the graph and the data structure used to represent the graph's vertex set (see section Choosing the Edgelist and VertexList for information about the tradeoffs of the different data structures).
The third argument, bidirectionalS, selects a directed graph that provides access to both out and in-edges. The other options for the third argument are directedS which selects a directed graph with only out-edges, and undirectedS which selects an undirected graph.
Once we have the graph type selected, we can create the graph in the figure by declaring a graph object and filling in edges using the add_edge() function of the MutableGraph interface (which adjacency_list implements). We use the array of pairs edge_array merely as a convenient way to explicitly create the edges for this example.
#include <iostream> // for std::cout
#include <utility> // for std::pair
#include <algorithm> // for std::for_each
#include <boost/graph/graph_traits.hpp>
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/dijkstra_shortest_paths.hpp>
using namespace boost;
int main(int,char*[])
{
// create a typedef for the Graph type
typedef adjacency_list<vecS, vecS, bidirectionalS> Graph;
// Make convenient labels for the vertices
enum { A, B, C, D, E, N };
const int num_vertices = N;
const char* name = "ABCDE";
// writing out the edges in the graph
typedef std::pair<int, int> Edge;
Edge edge_array[] =
{ Edge(A,B), Edge(A,D), Edge(C,A), Edge(D,C),
Edge(C,E), Edge(B,D), Edge(D,E)
};
const int num_edges = sizeof(edge_array)/sizeof(edge_array[0]);
// declare a graph object
Graph g(num_vertices);
// add the edges to the graph object
for (int i = 0; i < num_edges; ++i)
add_edge(edge_array[i].first, edge_array[i].second, g);
...
return 0;
}
Instead of calling the add_edge() function for each edge, we could use the edge iterator constructor of the graph. This is typically more efficient than using add_edge(). Pointers to the edge_array can be viewed as iterators, so we can call the iterator constructor by passing pointers to the beginning and end of the array.
Graph g(edge_array, edge_array + sizeof(edge_array) / sizeof(Edge), num_vertices);
Instead of creating a graph with a certain number of vertices to begin with, it is also possible to add and remove vertices with the add_vertex() and remove_vertex() functions, also of the MutableGraph interface.
Accessing the Vertex Set
Now that we have created a graph, we can use the graph interface to access the graph data in different ways. First we can access all of the vertices in the graph using the vertices() function of the VertexListGraph interface. This function returns a std::pair of vertex iterators (the first iterator points to the beginning of the vertices and the second iterator points past the end). Dereferencing a vertex iterator gives a vertex object. The type of the vertex iterator is given by the graph_traits class. Note that different graph classes can have different associated vertex iterator types, which is why we need the graph_traits class. Given some graph type, the graph_traits class will provide access to the vertex_iterator type.
The following example prints out the index for each of the vertices in the graph. All vertex and edge properties, including index, are accessed via property map objects. The property_map class is used to obtain the property map type for a specific property (specified by vertex_index_t, one of the BGL predefined properties) and function call get(vertex_index, g) returns the actual property map object.
// ...
int main(int,char*[])
{
// ...
typedef graph_traits<Graph>::vertex_descriptor Vertex;
// get the property map for vertex indices
typedef property_map<Graph, vertex_index_t>::type IndexMap;
IndexMap index = get(vertex_index, g);
std::cout << "vertices(g) = ";
typedef graph_traits<Graph>::vertex_iterator vertex_iter;
std::pair<vertex_iter, vertex_iter> vp;
for (vp = vertices(g); vp.first != vp.second; ++vp.first) {
Vertex v = *vp.first;
std::cout << index[v] << " ";
}
std::cout << std::endl;
// ...
return 0;
}
The output is:
vertices(g) = 0 1 2 3 4
Accessing the Edge Set
The set of edges for a graph can be accessed with the edges() function of the EdgeListGraph interface. Similar to the vertices() function, this returns a pair of iterators, but in this case the iterators are edge iterators. Dereferencing an edge iterator gives an edge object. The source() and target() functions return the two vertices that are connected by the edge. Instead of explicitly creating a std::pair for the iterators, this time we will use the tie() helper function. This handy function can be used to assign the parts of a std::pair into two separate variables, in this case ei and ei_end. This is usually more convenient than creating a std::pair and is our method of choice for the BGL
Note Seestd::tie for an STL replacement.
// ...
int main(int,char*[])
{
// ...
std::cout << "edges(g) = ";
graph_traits<Graph>::edge_iterator ei, ei_end;
for (tie(ei, ei_end) = edges(g); ei != ei_end; ++ei)
std::cout << "(" << index[source(*ei, g)]
<< "," << index[target(*ei, g)] << ") ";
std::cout << std::endl;
// ...
return 0;
}
The output is:
edges(g) = (0,1) (0,3) (2,0) (3,2) (2,4) (1,3) (3,4)
The Adjacency Structure
In the next few examples we will explore the adjacency structure of the graph from the point of view of a particular vertex. We will look at the vertices' in-edges, out-edges, and its adjacent vertices. We will encapsulate this in an exercise_vertex function, and apply it to each vertex in the graph. To demonstrate the STL-interoperability of BGL, we will use the STL for_each() function to iterate through the vertices and apply the function.
//...
int main(int,char*[])
{
//...
std::for_each(vertices(g).first, vertices(g).second,
exercise_vertex<Graph>(g));
return 0;
}
We use a functor for exercise_vertex instead of just a function because the graph object will be needed when we access information about each vertex; using a functor gives us a place to keep a reference to the graph object during the execution of the std::for_each(). Also we template the functor on the graph type so that it is reusable with different graph classes. Here is the start of the exercise_vertex functor:
template <class Graph> struct exercise_vertex {
exercise_vertex(Graph& g_) : g(g_) {}
//...
Graph& g;
};
Vertex Descriptors
The first thing we need to know in order to write the operator() method of the functor is the type for the vertex objects of the graph. The vertex type will be the parameter to the operator() method. To be precise, we do not deal with actual vertex objects, but rather with vertex descriptors. Many graph representations (such as adjacency lists) do not store actual vertex objects, while others do (e.g., pointer-linked graphs). This difference is hidden underneath the black-box
of the vertex descriptor object. The vertex descriptor is something provided by each graph type that can be used to access information about the graph via the out_edges(), in_edges(), adjacent_vertices(), and property map functions that are described in the following sections. The vertex_descriptor type is obtained through the graph_traits class. The typename keyword used below is necessary because the type on the left hand side of the scope :: operator (the graph_traits<Graph> type) is dependent on a template parameter (the Graph type). Here is how we define the functor's apply method:
template <class Graph> struct exercise_vertex {
//...
typedef typename graph_traits<Graph>::vertex_descriptor Vertex;
void operator()(const Vertex& v) const
{
//...
}
//...
};
Out-Edges, In-Edges, and Edge Descriptors
The out-edges of a vertex are accessed with the out_edges() function of the IncidenceGraph interface. The out_edges() function takes two arguments: the first argument is the vertex and the second is the graph object. The function returns a pair of iterators which provide access to all of the out-edges of a vertex (similar to how the vertices() function returned a pair of iterators). The iterators are called out-edge iterators and dereferencing one of these iterators gives an edge descriptor object. An edge descriptor plays the same kind of role as the vertex descriptor object, it is a black box
provided by the graph type. The following code snippet prints the source-target pairs for each out-edge of vertex v.
template <class Graph> struct exercise_vertex {
//...
void operator()(const Vertex& v) const
{
typedef graph_traits<Graph> GraphTraits;
typename property_map<Graph, vertex_index_t>::type
index = get(vertex_index, g);
std::cout << "out-edges: ";
typename GraphTraits::out_edge_iterator out_i, out_end;
typename GraphTraits::edge_descriptor e;
for (tie(out_i, out_end) = out_edges(v, g);
out_i != out_end; ++out_i) {
e = *out_i;
Vertex src = source(e, g), targ = target(e, g);
std::cout << "(" << index[src] << ","
<< index[targ] << ") ";
}
std::cout << std::endl;
//...
}
//...
};
For vertex 0 the output is:
out-edges: (0,1) (0,2) (0,3) (0,4)
The in_edges() function of the BidirectionalGraph interface provides access to all the in-edges of a vertex through in-edge iterators. The in_edges() function is only available for the adjacency_list if bidirectionalS is supplied for the Directed template parameter. There is an extra cost in space when bidirectionalS is specified instead of directedS.
template <class Graph> struct exercise_vertex {
//...
void operator()(const Vertex& v) const
{
//...
std::cout << "in-edges: ";
typedef typename graph_traits<Graph> GraphTraits;
typename GraphTraits::in_edge_iterator in_i, in_end;
for (tie(in_i, in_end) = in_edges(v,g);
in_i != in_end; ++in_i) {
e = *in_i;
Vertex src = source(e, g), targ = target(e, g);
std::cout << "(" << index[src] << "," << index[targ] << ") ";
}
std::cout << std::endl;
//...
}
//...
};
For vertex 0 the output is:
in-edges: (2,0) (3,0) (4,0)
Adjacent Vertices
Given the out-edges of a vertex, the target vertices of these edges are adjacent to the source vertex. Sometimes an algorithm does not need to look at the edges of the graph and only cares about the vertices. Therefore the graph interface also includes the adjacent_vertices() function of the AdjacencyGraph interface which provides direct access to the adjacent vertices. This function returns a pair of adjacency iterators. Dereferencing an adjacency iterator gives a vertex descriptor for an adjacent vertex.
template <class Graph> struct exercise_vertex {
//...
void operator()(Vertex v) const
{
//...
std::cout << "adjacent vertices: ";
typename graph_traits<Graph>::adjacency_iterator ai;
typename graph_traits<Graph>::adjacency_iterator ai_end;
for (tie(ai, ai_end) = adjacent_vertices(v, g);
ai != ai_end; ++ai)
std::cout << index[*ai] << " ";
std::cout << std::endl;
}
//...
};
For vertex 4 the output is:
adjacent vertices: 0 1
Adding Some Color to your Graph
In the following example, we construct a graph and apply dijkstra_shortest_paths(). The complete source code for the example is in examples/dijkstra-example.cpp. Dijkstra's algorithm computes the shortest distance from the starting vertex to every other vertex in the graph.
Dijkstra's algorithm requires that a weight property is associated with each edge and a distance property with each vertex. Here we use an internal property for the weight and an external property for the distance. For the weight property we use the property class and specify int as the type used to represent weight values and edge_weight_t for the property tag (which is one of the BGL predefined property tags). The weight property is then used as a template argument for adjacency_list.
The listS and vecS types are selectors that determine the data structure used inside the adjacency_list (see Choosing the Edgelist and VertexList). The directedS type specifies that the graph should be directed (versus undirected). The following code shows the specification of the graph type and then the initialization of the graph. The edges and weights are passed to the graph constructor in the form of iterators (a pointer qualifies as a RandomAccessIterator)
typedef adjacency_list<listS, vecS, directedS,
no_property, property<edge_weight_t, int> > Graph;
typedef graph_traits<Graph>::vertex_descriptor Vertex;
typedef std::pair<int,int> E;
const int num_nodes = 5;
E edges[] = { E(0,2),
E(1,1), E(1,3), E(1,4),
E(2,1), E(2,3),
E(3,4),
E(4,0), E(4,1) };
int weights[] = { 1, 2, 1, 2, 7, 3, 1, 1, 1};
Graph G(edges, edges + sizeof(edges) / sizeof(E), weights, num_nodes);
For the external distance property we will use a std::vector for storage. BGL algorithms treat random access iterators as property maps, so we can just pass the beginning iterator of the distance vector to Dijkstra's algorithm. Continuing the above example, the following code shows the creation of the distance vector, the call to Dijkstra's algorithm (implicitly using the internal edge weight property), and then the output of the results.
// vector for storing distance property
std::vector<int> d(num_vertices(G));
// get the first vertex
Vertex s = *(vertices(G).first);
// invoke variant 2 of Dijkstra's algorithm
dijkstra_shortest_paths(G, s, distance_map(&d[0]));
std::cout << "distances from start vertex:" << std::endl;
graph_traits<Graph>::vertex_iterator vi;
for(vi = vertices(G).first; vi != vertices(G).second; ++vi)
std::cout << "distance(" << index(*vi) << ") = "
<< d[*vi] << std::endl;
std::cout << std::endl;
The output being:
distances from start vertex: distance(0) = 0 distance(1) = 6 distance(2) = 1 distance(3) = 4 distance(4) = 5
Graph (Internal) Properties
BGL attempts to be as flexible as possible in terms of accommodating how properties are attached to a graph. For instance, a property such as edge weight may need to be used throughout a graph object's lifespan and therefore it would be convenient to have the graph object also manage the property storage. On the other hand, a property like vertex color may only be needed for the duration of a single algorithm, and it would be better to have the property stored separately from the graph object. The first kind of property is called an internally stored property while the second kind is called an externally stored property. BGL uses a uniform mechanism to access both kinds of properties inside its graph algorithms called the property map interface, described in Property Map Concepts. In addition, the PropertyGraph concept defines the interface for obtaining a property map object for an internally stored property.
The BGL adjacency_list class allows users to specify internally stored properties through plug-in template parameters of the graph class. How to do this is discussed in detail in Internal Properties. Externally stored properties can be created in many different ways, although they are ultimately passed as separate arguments to the graph algorithms. One straightforward way to store properties is to create an array indexed by vertex or edge index. In the adjacency_list with vecS specified for the VertexList template parameter, vertices are automatically assigned indices, which can be accessed via the property map for the vertex_index_t. Edges are not automatically assigned indices. However the property mechanism can be used to attach indices to the edges which can be used to index into other externally stored properties.
Properties can be attached to the vertices or edges of an adjacency_list graph via the property interface. The template parameters VertexProperty and EdgeProperty of the adjacency_list class are meant to be filled by these interior properties.
Bundled Properties
Note Bundled properties will only work properly on compilers that support class template partial specialization.
Class templates adjacency_list and adjacency_matrix support the introduction of named properties via internal properties. However, this method is cumbersome in many uses, where it would be more intuitive to just specify a structure or class that contains internal properties for edges or vertices. Bundled properties allow one to use adjacency_list and adjacency_matrix in this manner, providing a simple way to introduce and access any number of internal properties for vertices and edges.
One can introduce bundled properties into either an adjacency_list or an adjacency_matrix by providing a user-defined class type for the VertexProperties or EdgeProperties template arguments. The user-defined class may alternatively be placed at the end of a property list, replacing the (implicit) boost::no_property argument.
Example: Route planning
Consider the implementation of a simple route planner that should find the shortest directions from one city to another via a set of highways. The vertices of the graph are cities, and we may wish to store several bits of information about the city within each vertex:
struct City
{
string name;
int population;
vector<int> zipcodes;
};
The edges in the graph represent highways, which also have several interesting attributes:
struct Highway
{
string name;
double miles;
int speed_limit;
int lanes;
bool divided;
};
With bundled properties, we can directly use the City and Highway structures:
typedef boost::adjacency_list<
boost::listS, boost::vecS, boost::bidirectionalS,
City, Highway> Map;
Accessing bundled properties
To access a bundled property for a particular edge or vertex, subscript your graph with the descriptor of the edge or vertex whose bundled property you wish to access. For instance:
Map map; // load the map Map::vertex_descriptor v = *vertices(map).first; map[v].name = "Troy"; map[v].population = 49170; map[v].zipcodes.push_back(12180); Map::edge_descriptor e = *out_edges(v, map).first; map[e].name = "I-87"; map[e].miles = 10; map[e].speed_limit = 65; map[e].lanes = 4; map[e].divided = true;
Properties maps from bundled properties
Often one needs to create a property map from an internal property for use in a generic algorithm. For instance, using the graph without bundled properties we might invoke Dijkstra's shortest paths algorithm like this:
vector<double> distances(num_vertices(map));
dijkstra_shortest_paths(map, from,
weight_map(get(edge_length, map)),
distance_map(make_iterator_property_map(distances.begin(),
get(vertex_index, map))));
With bundled properties, we can just pass a member pointer as the property for get. The equivalent example using bundled properties is:
vector<double> distances(num_vertices(map));
dijkstra_shortest_paths(map, from,
weight_map(get(&Highway::miles, map)),
distance_map(make_iterator_property_map(distances.begin(),
get(vertex_index, map))));
The type of the returned property map is property_map<Map, int Highway::*>::type or property_map<Map, int Highway::*>::const_type, depending on whether the graph map is non-constant or constant.
You may also access the entire vertex or edge bundle as a property map using the vertex_bundle or edge_bundle properties, respectively. For instance, the property map returned by get(vertex_bundle, map) is an Lvalue Property Map providing access to the City values stored in each vertex.
Graph Data Structures
The BGL currently provides two graph classes and an edge list adaptor:
adjacency_listadjacency_matrixedge_list
The adjacency_list class is the general purpose graph class. It is highly parameterized so that it can be optimized for different situations: the graph is directed or undirected, allow or disallow parallel edges, efficient access to just the out-edges or also to the in-edges, fast vertex insertion and removal at the cost of extra space overhead, etc.
The adjacency_matrix class stores edges in a |V| x |V| matrix (where |V| is the number of vertices). The elements of this matrix represent edges in the graph. Adjacency matrix representations are especially suitable for very dense graphs, i.e., those where the number of edges approaches |V|2. The adjacency list class is a good choice for most situations, particularly for representing sparse graphs.
The edge_list class is an adaptor that takes any kind of edge iterator and implements an Edge List Graph.
Graph Traits with graph_traits<MY_GRAPH_TYPE>
Just like the iterators of STL, graphs have associated types. As stated in the various graph concepts, a graph has quite a few associated types: vertex_descriptor, edge_descriptor, out_edge_iterator, etc.
Any particular graph concepts will not require that all of the following associated types be defined.
When implementing a graph class that fullfils one or more graph concepts, for associated types that are not required by the concepts, it is all right to use void as the type (when using nested typedefs inside the graph class), or to leave the typedef out of the graph_traits specialization for the graph class.
Note that because of the use of traits classes rather than member types, it is not safe (and often will not work) to define subclasses of BGL graph types; those types may be missing important traits and properties that were defined externally to the class definition.
Definition
Defined in boost/graph/graph_traits.hpp is the following struct:
template <typename Graph>
struct graph_traits {
typedef typename Graph::vertex_descriptor vertex_descriptor;
typedef typename Graph::edge_descriptor edge_descriptor;
typedef typename Graph::adjacency_iterator adjacency_iterator;
typedef typename Graph::out_edge_iterator out_edge_iterator;
typedef typename Graph::in_edge_iterator in_edge_iterator;
typedef typename Graph::vertex_iterator vertex_iterator;
typedef typename Graph::edge_iterator edge_iterator;
typedef typename Graph::directed_category directed_category;
typedef typename Graph::edge_parallel_category edge_parallel_category;
typedef typename Graph::traversal_category traversal_category;
typedef typename Graph::vertices_size_type vertices_size_type;
typedef typename Graph::edges_size_type edges_size_type;
typedef typename Graph::degree_size_type degree_size_type;
};
Members
| Member | Description |
|---|---|
vertex_descriptor | The type for the objects used to identity vertices in the graph. |
edge_descriptor | The type for the objects used to identity edges in the graph. |
adjacency_iterator | The type for the iterators that traverse the vertices adjacent to a vertex. |
out_edge_iterator | The type for the iterators that traverse through the out-edges of a vertex. |
in_edge_iterator | The type for the iterators that traverse through the in-edges of a vertex. |
vertex_iterator | The type for the iterators that traverse through the complete vertex set of the graph. |
edge_iterator | The type for the iterators that traverse through the complete edge set of the graph. |
directed_category | This says whether the graph is undirected (undirected_tag) or directed (directed_tag). |
edge_parallel_category | This says whether the graph allows parallel edges to be inserted (allow_parallel_edge_tag) or if it automatically removes parallel edges (disallow_parallel_edge_tag). |
traversal_category | The ways in which the vertices in the graph can be traversed. The traversal category tags are: incidence_graph_tag, adjacency_graph_tag, bidirectional_graph_tag, vertex_list_graph_tag, edge_list_graph_tag, adjacency_matrix_tag. You can also create your own tag which should inherit from one or more of the above. |
vertices_size_type | The unsigned integer type used for representing the number of vertices in the graph. |
edges_size_type | The unsigned integer type used for representing the number of edge in the graph. |
degree_size_type | The unsigned integer type used for representing the degree of vertices in the graph. |
Graph Interfaces
We shall describe the base Graph interface and its refinements.
The Base Graph Interface
The Graph concept contains a few requirements that are common to all the graph concepts. These include some associated types for vertex_descriptor, edge_descriptor, etc. One should note that a model of Graph is not required to be a model of Assignable, so algorithms should pass graph objects by reference.
Notation
G A type that is a model of Graph.
g An object of type G.
Associated Types
-
boost::graph_traits<G>::vertex_descriptor
- A vertex descriptor corresponds to a unique vertex in an abstract graph instance. A vertex descriptor must be Default Constructible, Assignable, and Equality Comparable.
-
boost::graph_traits<G>::edge_descriptor
- An edge descriptor corresponds to a unique edge (u,v) in a graph. An edge descriptor must be Default Constructible, Assignable, and Equality Comparable.
-
boost::graph_traits<G>::directed_category
- The choices are directed_tag and undirected_tag.
-
boost::graph_traits<G>::edge_parallel_category
- This describes whether the graph class allows the insertion of parallel edges (edges with the same source and target). The two tags are allow_parallel_edge_tag and disallow_parallel_edge_tag.
-
boost::graph_traits<G>::traversal_category
- This describes the ways in which the vertices and edges of the graph can be visited. The choices are incidence_graph_tag, adjacency_graph_tag, bidirectional_graph_tag, vertex_list_graph_tag, edge_list_graph_tag, and adjacency_matrix_tag.
Valid Expressions
-
boost::graph_traits<G>::null_vertex()
- Returns a special vertex_descriptor object which does not refer to any vertex of graph object which type is G.
Concept Checking Class
template <class G>
struct GraphConcept
{
typedef typename boost::graph_traits<G>::vertex_descriptor vertex_descriptor;
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
typedef typename boost::graph_traits<G>::directed_category directed_category;
typedef typename boost::graph_traits<G>::edge_parallel_category edge_parallel_category;
typedef typename boost::graph_traits<G>::traversal_category traversal_category;
void constraints() {
function_requires< DefaultConstructibleConcept<vertex_descriptor> >();
function_requires< EqualityComparableConcept<vertex_descriptor> >();
function_requires< AssignableConcept<vertex_descriptor> >();
function_requires< DefaultConstructibleConcept<edge_descriptor> >();
function_requires< EqualityComparableConcept<edge_descriptor> >();
function_requires< AssignableConcept<edge_descriptor> >();
}
G g;
};
Refinements of the Graph Interface
The refinements of the graph are:
-
IncidenceGraph -
The IncidenceGraph concept provides an interface for efficient access to the out-edges of each vertex in the graph.
Note The
IncidenceGraphinterface is further refined byBidirectionalGraph. -
BidirectionalGraph -
The BidirectionalGraph concept refines
IncidenceGraphand adds the requirement for efficient access to the in-edges of each vertex. -
AdjacencyGraph -
The AdjacencyGraph concept provides and interface for efficient access of the adjacent vertices to a vertex in a graph. This is quite similar to the
IncidenceGraphconcept (the target of an out-edge is an adjacent vertex), though... -
EdgeListGraph -
The EdgeListGraph concept refines the Graph concept, and adds the requirement for efficient access to all the edges in the graph.
-
AdjacencyMatrix -
The AdjacencyMatrix concept refines Graph concept and adds the requirement for efficient access to any edge in the graph given the source and target vertices.
-
VertexListGraph -
The VertexListGraph concept refines the Graph concept, and adds the requirement for efficient traversal of all the vertices in the graph.
The IncidenceGraph Interface
The IncidenceGraph concept provides an interface for efficient access to the out-edges of each vertex in the graph.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to incidence_graph_tag.
-
boost::graph_traits<G>::out_edge_iterator - An out-edge iterator for a vertex v provides access to the out-edges of the vertex. As such, the value type of an out-edge iterator is the edge descriptor type of its graph. An out-edge iterator must meet the requirements of MultiPassInputIterator.
-
boost::graph_traits<G>::degree_size_type - The unsigned integral type used for representing the number out-edges or incident edges of a vertex.
Valid expressions (global functions) are:
-
source(e, g) -
Returns the vertex descriptor for u of the edge (u,v) represented by e.
Return type: vertex_descriptor
-
target(e, g) -
Returns the vertex descriptor for v of the edge (u,v) represented by e.
Return type: vertex_descriptor
-
out_edges(u, g) -
Returns an iterator-range providing access to the out-edges (for directed graphs) or incident edges (for undirected graphs) of vertex u in graph g. The source vertex of an edge obtained via an out edge iterator is guaranteed (for both directed and undirected graphs) to be the vertex u used in the call to out_edges(u, g) and the target vertex must be a vertex adjacent to u.
Return type:
std::pair<out_edge_iterator, out_edge_iterator> -
out_degree(u, g) -
Returns the number of out-edges (for directed graphs) or the number of incident edges (for undirected graphs) of vertex u in graph g.
Return type: degree_size_type
Note For undirected graphs, the edge (u,v) is the same as edge (v,u), so without some extra guarantee an implementation would be free use any ordering for the pair of vertices in an out-edge. For example, if you call out_edges(u, g), and v is one of the vertices adjacent to u, then the implementation would be free to return (v,u) as an out-edge which would be non-intuitive and cause trouble for algorithms. Therefore, the extra requirement is added that the out-edge connecting u and v must be given as (u,v) and not (v,u).
The BidirectionalGraph Interface
The BidirectionalGraph concept refines IncidenceGraph and adds the requirement for efficient access to the in-edges of each vertex. This concept is separated from IncidenceGraph because for directed graphs efficient access to in-edges typically requires more storage space, and many algorithms do not require access to in-edges. For undirected graphs this is not an issue, since the in_edges() and out_edges() functions are the same, they both return the edges incident to the vertex.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to bidirectional_graph_tag.
-
boost::graph_traits<G>::in_edge_iterator - An in-edge iterator for a vertex v provides access to the in-edges of v. As such, the value type of an in-edge iterator is the edge descriptor type of its graph. An in-edge iterator must meet the requirements of MultiPassInputIterator.
Valid expressions (global functions) are:
-
in_edges(v, g) -
Returns an iterator-range providing access to the in-edges (for directed graphs) or incident edges (for undirected graphs) of vertex v in graph g. For both directed and undirected graphs, the target of an out-edge is required to be vertex v and the source is required to be a vertex that is adjacent to v.
Return type:
std::pair<in_edge_iterator, in_edge_iterator> -
in_degree(v, g) -
Returns the number of in-edges (for directed graphs) or the number of incident edges (for undirected graphs) of vertex v in graph g.
Return type: degree_size_type
-
degree(v, g) -
Returns the number of in-edges plus out-edges (for directed graphs) or the number of incident edges (for undirected graphs) of vertex v in graph g.
Return type: degree_size_type
Concept Checking Class
template <class G>
struct BidirectionalGraphConcept
{
typedef typename boost::graph_traits<G>::in_edge_iterator
in_edge_iterator;
void constraints() {
BOOST_CONCEPT_ASSERT(( IncidenceGraphConcept<G> ));
BOOST_CONCEPT_ASSERT(( MultiPassInputIteratorConcept<in_edge_iterator> ));
p = in_edges(v, g);
e = *p.first;
const_constraints(g);
}
void const_constraints(const G& g) {
p = in_edges(v, g);
e = *p.first;
}
std::pair<in_edge_iterator, in_edge_iterator> p;
typename boost::graph_traits<G>::vertex_descriptor v;
typename boost::graph_traits<G>::edge_descriptor e;
G g;
};
The AdjacencyGraph Interface
The AdjacencyGraph concept provides and interface for efficient access of the adjacent vertices to a vertex in a graph. This is quite similar to the IncidenceGraph concept (the target of an out-edge is an adjacent vertex). Both concepts are provided because in some contexts there is only concern for the vertices, whereas in other contexts the edges are also important.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to adjacency_graph_tag.
-
boost::graph_traits<G>::adjacency_iterator - An adjacency iterator for a vertex v provides access to the vertices adjacent to v. As such, the value type of an adjacency iterator is the vertex descriptor type of its graph. An adjacency iterator must meet the requirements of MultiPassInputIterator.
Valid expressions (global functions) are:
-
adjacent_vertices(v, g) -
Returns an iterator-range providing access to the vertices adjacent to vertex v in graph g.
Return type:
std::pair<adjacency_iterator, adjacency_iterator>
Note The case of a multigraph (where multiple edges can connect the same two vertices) brings up an issue as to whether the iterators returned by the adjacent_vertices() function access a range that includes each adjacent vertex once, or whether it should match the behavior of the out_edges() function, and access a range that may include an adjacent vertex more than once. For now the behavior is defined to match that of out_edges(), though this decision may need to be reviewed in light of more experience with graph algorithm implementations.
Design Rationale
The AdjacencyGraph concept is somewhat frivolous since IncidenceGraph really covers the same functionality (and more). The AdjacencyGraph concept exists because there are situations when adjacent_vertices() is more convenient to use than out_edges(). If you are constructing a graph class and do not want to put in the extra work of creating an adjacency iterator, have no fear. There is an adaptor class named adjacency_iterator that you can use to create an adjacency iterator out of an out-edge iterator.
The EdgeListGraph Interface
The EdgeListGraph concept refines the Graph concept, and adds the requirement for efficient access to all the edges in the graph.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to edge_list_graph_tag.
-
boost::graph_traits<G>::edge_iterator - An edge iterator (obtained via edges(g)) provides access to all of the edges in a graph. An edge iterator type must meet the requirements of MultiPassInputIterator. The value type of the edge iterator must be the same as the edge descriptor of the graph.
-
boost::graph_traits<G>::edges_size_type - The unsigned integer type used to represent the number of edges in the graph.
Valid expressions (global functions) are:
-
edges(g) -
Returns an iterator-range providing access to all the edges in the graph g.
Return type:
std::pair<edge_iterator, edge_iterator></dd> -
num_edges(g) -
Returns the number of edges in the graph g.
Return type: edges_size_type
-
source(e, g) -
Returns the vertex descriptor for u of the edge (u,v) represented by e.
Return type: vertex_descriptor
-
target(e, g) -
Returns the vertex descriptor for v of the edge (u,v) represented by e.
Return type: vertex_descriptor
Concept Checking Class
template <class G>
struct EdgeListGraphConcept
{
typedef typename boost::graph_traits<G>::edge_iterator
edge_iterator;
void constraints() {
BOOST_CONCEPT_ASSERT(( GraphConcept<G> ));
BOOST_CONCEPT_ASSERT(( MultiPassInputIteratorConcept<edge_iterator> ));
p = edges(g);
E = num_edges(g);
e = *p.first;
u = source(e, g);
v = target(e, g);
const_constraints(g);
}
void const_constraints(const G& g) {
p = edges(g);
E = num_edges(g);
e = *p.first;
u = source(e, g);
v = target(e, g);
}
std::pair<edge_iterator,edge_iterator> p;
typename boost::graph_traits<G>::vertex_descriptor u, v;
typename boost::graph_traits<G>::edge_descriptor e;
typename boost::graph_traits<G>::edges_size_type E;
G g;
};
The AdjacencyMatrix Interface
The AdjacencyMatrix concept refines Graph concept and adds the requirement for efficient access to any edge in the graph given the source and target vertices. No Boost Graph Library algorithms currently use this concept. However there are algorithms not yet implemented such as Floyd-Warshall that would require this concept.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to adjacency_matrix_tag.
Valid expressions (global functions) are:
-
edge(u, v, g) -
Returns a pair consisting of a flag saying whether there exists an edge between u and v in graph g, and consisting of the edge descriptor if the edge was found.
Return type:
std::pair<edge_descriptor, bool>
Concept Checking Class
template <class G>
struct AdjacencyMatrix
{
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
void constraints() {
p = edge(u, v, g);
}
typename boost::graph_traits<G>::vertex_descriptor u, v;
std::pair<bool, edge_descriptor> p;
G g;
};
The VertexListGraph Interface
The VertexListGraph concept refines the Graph concept, and adds the requirement for efficient traversal of all the vertices in the graph.
Its associated types:
-
boost::graph_traits<G>::traversal_category - This tag type must be convertible to vertex_list_graph_tag.
-
boost::graph_traits<G>::vertex_iterator - A vertex iterator (obtained via vertices(g)) provides access to all of the vertices in a graph. A vertex iterator type must meet the requirements of MultiPassInputIterator. The value type of the vertex iterator must be the vertex descriptor of the graph.
-
boost::graph_traits<G>::vertices_size_type - The unsigned integer type used to represent the number of vertices in the graph.
Valid expressions (global functions) are:
-
vertices(g) -
Returns an iterator-range providing access to all the vertices in the graph g.
Return type:
std::pair<vertex_iterator, vertex_iterator> -
num_vertices(g) -
Returns the number of vertices in the graph g.
Return type:
vertices_size_type
Design Rationale
One issue in the design of this concept is whether to include the refinement from the IncidenceGraph and AdjacencyGraph concepts. The ability to traverse the vertices of a graph is orthogonal to traversing out-edges, so it would make sense to have a VertexListGraph concept that only includes vertex traversal. However, such a concept would no longer really be a graph, but would just be a set, and the STL already has concepts for dealing with such things. However, there are many BGL algorithms that need to traverse the vertices and out-edges of a graph, so for convenience a concept is needed that groups these requirements together, hence the VertexListGraph.
MutableGraph
A MutableGraph is a graph that can be changed via the addition or removal of edges and vertices.
Refinement of
Graph
Notation
- G A type that is a model of Graph.
- g An object of type G.
- e An object of type boost::graph_traits<G>::edge_descriptor.
- u,v are objects of type boost::graph_traits<G>::vertex_descriptor.
- iter is an object of type boost::graph_traits<G>::out_edge_iterator.
- p is an object of a type that models Predicate and whose argument type matches the edge_descriptor type.
Valid Expressions
-
add_edge(u, v, g)
-
Inserts the edge (u,v) into the graph, and returns an edge descriptor pointing to the new edge. If the graph disallows parallel edges, and the edge (u,v) is already in the graph, then the bool flag returned is false and the returned edge descriptor points to the already existing edge. Note that for undirected graphs, (u,v) is the same edge as (v,u), so after a call to the function add_edge(), this implies that edge (u,v) will appear in the out-edges of u and (u,v) (or equivalently (v,u)) will appear in the out-edges of v. Put another way, v will be adjacent to u and u will be adjacent to v.
Return type:
std::pair<edge_descriptor, bool> -
remove_edge(u, v, g)
-
Remove the edge (u,v) from the graph. If the graph allows parallel edges this remove all occurrences of (u,v).
Return type: void
Precondition: u and v are vertices in the graph.
Postcondition: (u,v) is no longer in the edge set for g.
-
remove_edge(e, g)
-
Remove the edge e from the graph.
Return type: void
Precondition: e is an edge in the graph.
Postcondition: e is no longer in the edge set for g.
-
remove_edge(iter, g)
-
Remove the edge pointed to be iter from the graph. This expression is only required when the graph also models IncidenceGraph.
Return type: void
Precondition: *iter is an edge in the graph.
Postcondition: *iter is no longer in the edge set for g.
-
remove_edge_if(p, g)
-
Remove all the edges from graph g for which the predicate p returns true.
Return type: void
-
remove_out_edge_if(u, p, g)
-
Remove all the out-edges of vertex u for which the predicate p returns true. This expression is only required when the graph also models IncidenceGraph.
Return type: void
-
remove_in_edge_if(u, p, g)
-
Remove all the in-edges of vertex u for which the predicate p returns true. This expression is only required when the graph also models BidirectionalGraph.
Return type: void
-
add_vertex(g)
-
Add a new vertex to the graph. The vertex_descriptor for the new vertex is returned.
Return type: vertex_descriptor
-
clear_vertex(u, g)
-
Remove all edges to and from vertex u from the graph.
Return type: void
Precondition: u is a valid vertex descriptor of g.
Postcondition: u does not appear as a source or target of any edge in g.
-
remove_vertex(u, g)
-
Remove u from the vertex set of the graph. Note that undefined behavior may result if there are edges remaining in the graph who's target is u. Typically the clear_vertex() function should be called first.
Return type: void
Precondition: u is a valid vertex descriptor of g.
Postcondition: num_vertices(g) is one less, u no longer appears in the vertex set of the graph and it is no longer a valid vertex descriptor.
Complexity Guarantees
- Edge insertion must be either amortized constant time or it can be O(log(E/V)) if the insertion also checks to prevent the addition of parallel edges (which is a ``feature'' of some graph types).
- Edge removal is guaranteed to be O(E).
- Vertex insertion is guaranteed to be amortized constant time.
- Clearing a vertex is O(E + V).
- Vertex removal is O(E + V).
Models
adjacency_list
Concept Checking Class
template <class G>
struct MutableGraphConcept
{
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
void constraints() {
v = add_vertex(g);
clear_vertex(v, g);
remove_vertex(v, g);
e_b = add_edge(u, v, g);
remove_edge(u, v, g);
remove_edge(e, g);
}
G g;
edge_descriptor e;
std::pair<edge_descriptor, bool> e_b;
typename boost::graph_traits<G>::vertex_descriptor u, v;
typename boost::graph_traits<G>::out_edge_iterator iter;
};
template <class edge_descriptor>
struct dummy_edge_predicate {
bool operator()(const edge_descriptor& e) const {
return false;
}
};
template <class G>
struct MutableIncidenceGraphConcept
{
void constraints() {
function_requires< MutableGraph<G> >();
remove_edge(iter, g);
remove_out_edge_if(u, p, g);
}
G g;
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
dummy_edge_predicate<edge_descriptor> p;
typename boost::graph_traits<G>::vertex_descriptor u;
typename boost::graph_traits<G>::out_edge_iterator iter;
};
template <class G>
struct MutableBidirectionalGraphConcept
{
void constraints() {
function_requires< MutableIncidenceGraph<G> >();
remove_in_edge_if(u, p, g);
}
G g;
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
dummy_edge_predicate<edge_descriptor> p;
typename boost::graph_traits<G>::vertex_descriptor u;
};
template <class G>
struct MutableEdgeListGraphConcept
{
void constraints() {
function_requires< MutableGraph<G> >();
remove_edge_if(p, g);
}
G g;
typedef typename boost::graph_traits<G>::edge_descriptor edge_descriptor;
dummy_edge_predicate<edge_descriptor> p;
};
Graph Concepts
Just as the STL defines a collection of iterator concepts that provide a generic mechanism for traversing and accessing sequences of objects, BGL defines its own collection of concepts that specify how graphs can be inspected and manipulated.
In this section we give an overview of these concepts. The examples in this section do not refer to specific graph types; they are written as function templates with the graph as a template parameter. A generic function written using the BGL interface can be applied to any of the BGL graph types--or even to new user-defined graph types. Later on, we will discuss the concrete graph classes that are provided in the BGL.
Vertex and Edge Descriptors
In the BGL, vertices and edges are manipulated through opaque handles called vertex descriptors and edge descriptors. Different graph types may use different types for their descriptors. For example, some graph types may use integers, whereas other graphs may use pointers. The descriptor types for a graph type are always accessible through the graph traits class.
Vertex descriptors have very basic functionality. By themselves they can only be default constructed, copied, and compared for equality. Edge descriptors are similar, although they also provide access to the associated source and target vertex. The following function template shows an implementation a generic function that determines if an edge is a self-loop:
template <var class='type'name Graph>
bool is self loop(typename graph traits<Graph>::edge descriptor e, const Graph& g) {
typename graph traits<Graph>::vertex descriptor u, v;
u = source(e, g);
v = target(e, g);
return u == v;
}
Summary of BGL Concepts
The table below gives a summary of the valid expressions and associated types for the graph concepts and provides links to the detailed descriptions of each of the concepts. The notation used in the table is as follows:
G | A type that is a model of Graph. |
g | An object of type G. |
e | An object of type boost::graph_traits<G>::edge_descriptor. |
e_iter | An object of type boost::graph_traits<G>::out_edge_iterator. |
u,v | Are objects of type boost::graph_traits<G>::vertex_descriptor. |
ep | is an object of type G::edge_property_type |
vp | is an object of type G::vertex_property_type |
Property | A type used to specify a vertex or edge property. |
property | An object of type Property. |
| Expression | Return Type or Description |
|---|---|
| Graph | |
boost::graph_traits<G>::vertex_descriptor | The type for vertex representative objects. |
boost::graph_traits<G>::edge_descriptor | The type for edge representative objects. |
boost::graph_traits<G>::directed_category | Directed or undirected? |
boost::graph_traits<G>::edge_parallel_category | Allow parallel edges? |
boost::graph_traits<G>::traversal_category | The ways in which the vertices and edges of the graph can be visited. |
| IncidenceGraph refines Graph | |
boost::graph_traits<G>::out_edge_iterator | Iterate through the out-edges. |
boost::graph_traits<G>::degree_size_type | The integer type for vertex degree. |
out_edges(v, g) | std::pair<out_edge_iterator, out_edge_iterator> |
source(e, g) | vertex_descriptor |
target(e, g) | vertex_descriptor |
out_degree(v, g) | degree_size_type |
| BidirectionalGraph refines IncidenceGraph | |
boost::graph_traits<G>::in_edge_iterator | Iterate through the in-edges. |
in_edges(v, g) | std::pair<in_edge_iterator, in_edge_iterator> |
in_degree(v, g) | degree_size_type |
degree(e, g) | degree_size_type |
| AdjacencyGraph refines Graph | |
boost::graph_traits<G>::adjacency_iterator | Iterate through adjacent vertices. |
adjacent_vertices(v, g) | std::pair<adjacency_iterator, adjacency_iterator> |
| VertexListGraph refines Graph | |
boost::graph_traits<G>::vertex_iterator | Iterate through the graph's vertex set. |
boost::graph_traits<G>::vertices_size_type | The unsigned integer type for number of vertices in the graph. |
vertices(g) | std::pair<vertex_iterator, vertex_iterator> |
num_vertices(g) | vertices_size_type |
| EdgeListGraph refines Graph | |
boost::graph_traits<G>::edge_iterator | Iterate through the graph's edge set. |
boost::graph_traits<G>::edges_size_type | The unsigned integer type for number of edges in the graph. |
edges(g) | std::pair<edge_iterator, edge_iterator> |
num_edges(g) | edges_size_type |
source(e, g) | vertex_descriptor |
target(e, g) | vertex_descriptor |
| AdjacencyMatrix refines Graph | |
edge(u, v, g) | std::pair<edge_descriptor, bool> |
| MutableGraph refines Graph | |
add_vertex(g) | vertex_descriptor |
clear_vertex(v, g) | void |
remove_vertex(v, g) | void |
add_edge(u, v, g) | std::pair<edge_descriptor, bool> |
remove_edge(u, v, g) | void |
remove_edge(e, g) | void |
remove_edge(e_iter, g) | void |
| MutablePropertyGraph refines Graph | |
add_vertex(vp, g) | vertex_descriptor |
add_edge(u, v, ep, g) | std::pair<edge_descriptor, bool> |
| PropertyGraph refines Graph | |
boost::property_map<G, Property>::type | Type for a mutable property map. |
boost::property_map<G, Property>::const_type | Type for a non-mutable property map. |
get(property, g) | Function to get a property map. |
get(property, g, x) | Get property value for vertex or edge x. |
put(property, g, x, v) | Set property value for vertex or edge x to v. |
Graph Iterators for Traversals
The graph abstraction consists of several different kinds of collections: the vertices and edges for the graph and the out-edges, in-edges, and adjacent vertices for each vertex. The BGL uses iterators analogous to STL iterators to provide access to each of these collections. The value type of these iterators is a vertex or edge descriptor. There are five kinds of graph iterators, one for each kind of collection:
- A vertex iterator is used to traverse all the vertices of a graph. The value type of a vertex iterator is a vertex descriptor.
- An edge iterator is used to traverse all the edges of a graph. The value type of this iterator is an edge descriptor.
- An out-edge iterator is used to access all of the out-edges for a given vertex u. Its value type is an edge descriptor. Each edge descriptor in this iterator range will have u as the source vertex and a vertex adjacent to u as the target vertex (regardless of whether the graph is directed or undirected).
- An in-edge iterator is used to access the in-edges of a vertex v. Its value type is an edge descriptor. Each edge descriptor in this iterator range will have v as the target vertex and a vertex that v is adjacent to as the source.
- An adjacency iterator is used to provide access to the vertices adjacent to a given vertex. The value type of this iterator is a vertex descriptor.
Each graph type has its own iterator types that are accessible through the graph_traits class. For each of the above iterators, the BGL interface defines a function that returns a std::pair of iterator objects: the first iterator points to the first object in the sequence and the second iterator points past the end of the sequence.
For example, the following function prints the names of all of the vertices in a graph:
template <var class='type'name Graph, typename VertexNameMap>
void print vertex names(const Graph& g, VertexNameMap name map) {
std::cout << "vertices(g) = { ";
typedef typename graph traits<Graph>::vertex_iterator iter_t;
for (std::pair<iter t, iter t> p = vertices(g); p.first != p.second; ++p.first) {
print_vertex_name(*p.first, name_map);
std::cout << ' ';
}
std::cout << "}" << std::endl;
}
Most algorithms do not need to use all five types of traversal, and some graph types cannot provide efficient versions of all iterator types. Care should be taken not to use concrete graph types with algorithms that require operations not supported by that type. If you attempt to use a graph type that does not provide a required operation, then a compile error will occur. The compile error may even include some information to help you figure out which operation was missing.
The available operations for a particular graph type is given in the documentation for that type. The Model Of
section summarizes the provided operations by listing the concepts satisfied by the graph type. The operations required by each algorithm are given in the documentation for the algorithm by listing the concepts required of each parameter.
Graph Construction and Modification
The BGL also defines interfaces for adding and removing vertices and edges from a graph. The add_vertex() function returns a vertex descriptor for the new vertex. We use this vertex descriptor to assign a vertex name to the vertex in a name property map:
typename graph traits<Graph>::vertex descriptor a, b, c, d, e;
a = add vertex(g); name map[a] = 'a';
b = add vertex(g); name map[b] = 'b';
c = add vertex(g); name map[c] = 'c';
d = add vertex(g); name map[d] = 'd';
e = add vertex(g); name map[e] = 'e';
The add_edge() function returns a std::pair, where the first member of the pair is an edge descriptor for the new edge and the second is a Boolean flag that indicates whether an edge was added (some graph types will not insert an edge if an edge with the same source and target is already in the graph).
Parallel Edge Traits
In addition to specializing the container_gen class, one must also specialize the parallel_edge_traits class to specify whether the container type allows parallel edges (and is a Sequence) or if the container does not allow parallel edges (and is an AssociativeContainer).
template <class StorageSelector>
struct parallel_edge_traits { };
template <>
struct parallel_edge_traits<vecS> {
typedef allow_parallel_edge_tag type;
};
template <>
struct parallel_edge_traits<setS> {
typedef disallow_parallel_edge_tag type;
};
...
Graph Classes and Adaptors
The graph types provided by the BGL fall into two categories. The first is the graph classes that are used to store a graph in memory. The second is graph adaptors that create a modified view of a graph or that create a BGL graph interface based on some other type.
The BGL contains two primary graph classes: adjacency_list and adjacency_matrix.
adjacency_list
The adjacency_list class has several template parameters: EdgeList, VertexList, Directed, VertexProperties, EdgeProperties, and GraphProperties.
adjacency_list<OutEdgeList = vecS,
VertexList = vecS,
Directed = directedS,
VertexProperties = no_property,
EdgeProperties = no_property,
GraphProperties = no_property,
EdgeList = listS>
Vertex and Edge Properties
Properties such as color, distance, weight, and user-defined properties can be attached to the vertices and edges of the graph using properties. The property values can be read from and written to via the property maps provided by the graph. The property maps are obtained via the get(property, g) function. How to use properties is described in Internal Properties. The property maps are objects that implement the interface defined in Property Map Concepts or may be bundled properties, which have a more succinct syntax. The types of all property values must be Copy Constructible, Assignable, and Default Constructible. The property maps obtained from the adjacency_list class are models of the Lvalue Property Map concept. If the adjacency_list is const, then the property map is constant, otherwise the property map is mutable.
If the VertexList of the graph is vecS, then the graph has a builtin vertex indices accessed via the property map for the vertex_index_t property. The indices fall in the range [0, num_vertices(g)) and are contiguous. When a vertex is removed the indices are adjusted so that they retain these properties. Some care must be taken when using these indices to access exterior property storage. The property map for vertex index is a model of Readable Property Map.
Internal Properties
Bundled Properties
Class templates adjacency_list and adjacency_matrix support the introduction of named properties via internal properties. However, this method is cumbersome in many uses, where it would be more intuitive to just specify a structure or class that contains internal properties for edges or vertices. Bundled properties allow one to use adjacency_list and adjacency_matrix in this manner, providing a simple way to introduce and access any number of internal properties for vertices and edges.
One can introduce bundled properties into an either graph type by providing a user-defined class type for the VertexProperties or EdgeProperties template arguments. The user-defined class may alternatively be placed at the end of a property list, replacing the (implicit) boost::no_property argument.
Example: Route planning
Consider the implementation of a simple route planner that should find the shortest directions from one city to another via a set of highways. The vertices of the graph are cities, and we may wish to store several bits of information about the city within each vertex:
struct City
{
string name;
int population;
vector<int> zipcodes;
};
The edges in the graph represent highways, which also have several interesting attributes:
struct Highway
{
string name;
double miles;
int speed_limit;
int lanes;
bool divided;
};
With bundled properties, we can directly use the City and Highway structures to define the graph:
typedef boost::adjacency_list<
boost::listS, boost::vecS, boost::bidirectionalS,
City, Highway>
Map;
Without bundled properties, translating this example directly into an instantiation of adjacency_list would involve several custom properties and would result in a type like this:
typedef boost::adjacency_list<
boost::listS, boost::vecS, boost::bidirectionalS,
// Vertex properties
boost::property<boost::vertex_name_t, std::string,
boost::property<population_t, int,
boost::property<zipcodes_t, std::vector<int> > > >,
// Edge properties
boost::property<boost::edge_name_t, std::string,
boost::property<boost::edge_weight_t, double,
boost::property<edge_speed_limit_t, int,
boost::property<edge_lanes_t, int,
boost::property<edge_divided, bool> > > > > >
Map;
Bundling vertex and edge properties greatly simplifies the declaration of graphs.
In addition to vertex and edge bundles, we can also bundle properties of the graph itself. Suppopse we extend the application to include a portfolio of route-planning maps for different countries. In addition to the City and Highway bundles above, we can declare a graph bundle, Country.
struct Country {
string name;
bool use_right; // Drive on the left or right
bool use_metric; // mph or km/h
};
The graph type would now be declared as:
typedef boost::adjacency_list<
boost::listS, boost::vecS, boost::bidirectionalS,
City, Highway, Country>
Map;
Accessing bundled properties
To access a bundled property for a particular edge or vertex, subscript your graph with the descriptor of the edge or vertex whose bundled property you wish to access. For instance:
Map map; // load the map Map::vertex_descriptor v = *vertices(map).first; map[v].name = "Troy"; map[v].population = 49170; map[v].zipcodes.push_back(12180); Map::edge_descriptor e = *out_edges(v, map).first; map[e].name = "I-87"; map[e].miles = 10.; map[e].speed_limit = 65; map[e].lanes = 4; map[e].divided = true;
The graph bundle, since it does not correspond to a vertex or edge descripor, is accessed using the graph_bundle object as a key.
map[graph_bundle].name = "United States"; map[graph_bundle].use_right = true; map[graph_bundle].use_metric = false;
Property maps for a graph bundle
There is currently no support for creating property maps from the bundled properties of a graph.
Getting the type of bundled properties
To get the type of the vertex or edge bundle for a given graph type Graph, you can use the trait classes vertex_bundle_type and edge_bundle_type. The type vertex_bundle_type<Graph>::type will be the type bundled with vertices (or no_vertex_bundle if the graph supports bundles but no vertex bundle exists). Likewise, edge_bundle_type<Graph>::type will be the type bundled with edges (or no_edge_bundle if no edge bundle exists).
Compatibility
Bundled properties will only work properly on compilers that support class template partial specialization.
adjacency_matrix
The adjacency_matrix is the BGL class for representing dense graphs. In an adjacency_matrix, access to an arbitrary edge (u, v) is efficient (constant time). The adjacency matrix can represent both directed and undirected graphs and provides a mechanism for attaching properties to the vertices and edges.
Graph Adaptors
The BGL also includes a large number of graph adaptors. This first group of classes adapts any BGL graph to provide new behavior.
reverse_graphis an adaptor that reverses the edge directions of a directed graph on the fly, so that in-edges behave like out-edges, and vice versa.filtered_graphis an adaptor that creates a view of a graph where two predicate function objects control whether vertices and edges from the original graph appear in the adapted graph, or whether they are hidden.
BGL also provides support for objects and data structures that are not BGL graph classes. This support is provided via adaptor classes and overloaded functions. The following describes these interfaces.
- edge list is an adaptor that creates a BGL graph out of an iterator range of edges.
- Stanford GraphBase is supported by overloaded functions in the header file boost/- graph/stanford graph.hpp . As a result of these overloaded functions, the GraphBase type Graph* satisfies the BGL graph interface.
- LEDA is a popular object-oriented package that includes graph data structures and algorithms. Overloaded functions in the header file boost/graph/leda graph.hpp allow the LEDA graph type GRAPH<vtype, etype> to satisfy the BGL graph interface.
- The STL composite type std::vector< std::list<int> > is supported as a graph by overloaded functions in the header file boost/graph/vector_as_graph.hpp.
Each graph class implements some (or all) of these concepts. The adjacency_list class can be considered a canonical implementation (or model) of a BGL graph, as it illustrates all of the basic ideas and interfaces of the BGL graphs.
Boost Generic Graph Algorithms
The BGL graph algorithms are generic algorithms. As such, they are highly flexible in terms of the types of graph data structures to which they can be applied and in terms of how the algorithms can be customized to solve a wide range of problems.
The BGL algorithms consist of a core set of algorithm patterns (implemented as generic algorithms) and a larger set of graph algorithms. The core algorithm patterns are:
- Breadth First Search
- Depth First Search
- Uniform Cost Search
By themselves, the algorithm patterns do not compute any meaningful quantities over graphs; they are merely building blocks for constructing graph algorithms. The graph algorithms in the BGL currently include:
- Dijkstra's Shortest Paths
- Bellman-Ford Shortest Paths
- Johnson's All-Pairs Shortest Paths
- Kruskal's Minimum Spanning Tree
- Prim's Minimum Spanning Tree
- Connected Components
- Strongly Connected Components
- Dynamic Connected Components (using Disjoint Sets)
- Topological Sort
- Transpose
- Reverse Cuthill Mckee Ordering
- Smallest Last Vertex Ordering
- Sequential Vertex Coloring
Building the Topological Sort Generic Algorithm from generic depth_first_search()
First, we shall look at using the topological_sort() function with two different graph types, and then we shall demonstrate the power of the generic depth_first_search() function by showing how it can be used to implement topological sort().
A topological ordering of a directed graph is an ordering of its vertices such that if there is an edge (u, v) in the graph, then vertex u appears before vertex v in the ordering. The BGL topological_sort() function template takes two arguments: the graph to be ordered and an output iterator. The algorithm writes vertices to the output iterator in reverse topological order.
One use for topological orderings is for scheduling tasks.
Using Topological Sort with a Vector of Lists
First we apply the topological sort to a graph built using std::vector<std::list<int>>. The following is the outline of the program.
// "topo-sort1.cpp" 15a
#include <deque> // to store the vertex ordering
#include <vector>
#include <list>
#include <iostream>
#include <boost/graph/vector_as_graph.hpp>
#include <boost/graph/topological_sort.hpp>
int main()
{
using namespace boost;
// Create labels for each of the tasks 15b
// Create the graph 15c
// Perform the topological sort and output the results 16
return EXIT_SUCCESS;
}
The vertices of the graph are represented using the integers from zero to six; storing the vertex labels in an array is therefore a convenient choice.
// Create labels for each of the tasks 15b ≡
const char* tasks[ ] =
{
"pick up kids from school",
"buy groceries (and snacks)",
"get cash at ATM",
"drop off kids at soccer practice",
"cook dinner",
"pick up kids from soccer",
"eat dinner"
};
const int n_tasks = sizeof (tasks) / sizeof (char*);
The graph is realized as a vector of lists. Each vertex in the graph is associated with an index location in the vector. The size of the vector is thus the number of vertices in the graph. The list at that index location is used to represent the edges from that vertex to other vertices in the graph. Each edge (u, v) is added to the graph by pushing the integer for v onto the uth list. Due to the functions defined in boost/graph/vector_as_graph.hpp the vector of lists satisfies the requirements of the BGL VertexListGraph concept, and therefore can be used in the topological_sort() function.
// Create the graph 15c ≡ std::vector< std::list<int> > g(n tasks); g[0].push back(3); g[1].push back(3); g[1].push back(4); g[2].push back(1); g[3].push back(5); g[4].push back(6); g[5].push back(6);
Before we call topological_sort() we need to create a place to store the results. The BGL algorithm for topological sort writes its output in reverse topological order (because it is more efficient to implement it that way). Recovering the topological order requires reversing the ordering computed by the algorithm. The following example uses std::deque as its output data structure because it supports constant time insertion at the front, which will reverse the ordering. In addition, calling topological_sort() requires one of two things: (1) supply a color property map so that the algorithm can mark vertices to keep track of its progress through the graph or (2) supply a mapping from vertices to integers so that the algorithm can create its own color map with an array.
Since in this example the vertices are already integers, we just pass identity_property_map in as the vertex_index_map. The vertex_index_map() function is used to specify a named parameter.
// Perform the topological sort and output the results 16 ≡
std::deque<int> topo_order;
topological sort(g, std::front_inserter(topo_order),
vertex_index_map(identity_property_map()));
int n = 1;
for (std::deque<int>::iterator i = topo_order.begin();
i != topo order.end();
++i, ++n)
std::cout << tasks[*i] << std::endl;
The output shows an order in which the tasks could be carried out.
get cash at ATM buy groceries (and snacks) cook dinner pick up kids from school drop off kids at soccer practice pick up kids from soccer eat dinner
Using Topological Sort with the adjacency_list Class
To demonstrate the flexibility of the generic algorithm topological_sort() we now change to using an altogether different graph type: the BGL adjacency_list class template. Since the topological_sort() function is a function template, graph structures of arbitrary type can be used. All that is required is that the type satisfies the concepts required by the algorithm.
The first two template parameters of the adjacency list class determine the particular internal structure that will be used. The first argument listS specifies that std::list is used for each out-edge list. The second argument vecS specifies that std::vector is used as the backbone of the adjacency list. This version of the adjacency_list class is similar in character to the vector of lists used in the previous section.
// Create an adjacency list object 17a ≡ adjacency_list<listS, vecS, directedS> g(n_tasks);
The function add_edge() provides the interface for inserting edges into an adjacency_list (and all other graphs that support the EdgeMutableGraph concept). The vertex descriptor type for adjacency_list is an integer when std::vector is used for the backbone, which is why we can use integers below to specify vertices. It is not always true for a given graph type that one can use integers to specify vertices.
// Add edges to the adjacency list 17b i ≡ add_edge(0, 3, g); add_edge(1, 3, g); add_edge(1, 4, g); add_edge(2, 1, g); add_edge(3, 5, g); add_edge(4, 6, g); add_edge(5, 6, g);
The rest of the program is similar to the previous example, except that the adjacency_list.hpp header file is included instead of vector_as_graph.hpp. The following is the code for the program, with two of the parts reused from the previous section.
// "topo-sort2.cpp" 18 ≡
#include <vector>
#include <deque>
#include <boost/graph/topological_sort.hpp>
#include <boost/graph/adjacency_list.hpp>
int main() {
using namespace boost;
// Create labels for each of the tasks 15bi
// Create an adjacency list object 17ai
// Add edges to the adjacency list 17bi
// Perform the topological sort and output the results 16i
return EXIT_SUCCESS;
}
The Depth-First Search Generic Algorithm
The BGL implementation of topological_sort() is only a few lines long because it can be implemented using the depth_first_search() function (and, in fact, the topological sort algorithm is typically presented this way in text books). The implementation consists of depth_first_search() used with a visitor that records the order in which vertices pass through the "finish vertex" event of the depth-first search.
The following code creates an algorithm visitor class that records vertices as they pass through the finish event point of a depth-first search. For added genericity, the vertex ordering is recorded in an output iterator, allowing the user to choose from a variety of output methods.
template <var class='type'name OutputIterator>
class topo_sort_visitor : public default_dfs_visitor { // inherit empty actions
public:
topo_sort_visitor(OutputIterator iter) : m_iter(iter) { }
template <var class='type'name Vertex, typename Graph>
void finish_vertex(Vertex u, const Graph&) { *m_iter++ = u; }
private:
OutputIterator m_iter;
};
Thus, topological_sort() is implemented by invoking depth_first_search() using the topo_sort_visitor as a parameter.
template <var class='type'name Graph, typename OutputIterator>
void topological sort(Graph& g, OutputIterator result iter) {
topo_sort_visitor<OutputIterator> vis(result_iter);
depth_first_search(g, visitor(vis));
}
BGL Data Structures
The BGL provides two graph classes and an edge list adaptor:
The adjacency_list class is the general purpose swiss army knife
of graph classes. It is highly parameterized so that it can be optimized for different situations: the graph is directed or undirected, allow or disallow parallel edges, efficient access to just the out-edges or also to the in-edges, fast vertex insertion and removal at the cost of extra space overhead, etc.
The adjacency_matrix class stores edges in a n x n matrix (where n is the number of vertices). The elements of this matrix represent edges in the graph. Adjacency matrix representations are especially suitable for very dense graphs, i.e., those where the number of edges approaches n2.
The edge_list class is an adaptor that takes any kind of edge iterator and implements an Edge List Graph.
BGL adjacency_matrix*
BGL edge_list
BGL Edge List Graph*
BGL Property Maps
The main link between the abstract mathematical nature of graphs and the concrete problems they are used to solve is the properties that are attached to the vertices and edges of a graph, things like distance, capacity, weight, color, etc. There are many ways to attach properties to a graph in terms of data-structure implementation, but graph algorithms should not have to deal with the implementation details of the properties. The property map interface discussed provides a generic method for accessing properties from graphs. This is the interface used in the BGL algorithms to access properties.
In the BGL we refer to attached objects or attached quantities as properties. There are a wide variety of implementation techniques that can be used to associate a property with a vertex or edge. These include properties as data members of a struct, separate arrays indexed by vertex or edge number, hash tables, and so on. However, to write generic graph algorithms we need a uniform syntax for accessing properties, regardless of how they are stored. This uniform syntax is defined by the property map concepts.
The following example is a generic function that prints the name of a vertex given a name property map:
template <var class='type'name VertexDescriptor, typename VertexNameMap>
void print_vertex name(VertexDescriptor v, VertexNameMap name map) {
std::cout << get(name map, v);
}
...
Property Map Interface
The property map interface specifies that each property is accessed using a separate property map object. In the following example we show an implementation of the relax() function used inside of Dijkstra's shortest paths algorithm. In this function, we need to access the weight property of an edge, and the distance property of a vertex. We write relax() as a template function so that it can be used in many difference situations. Two of the arguments to the function, weight and distance, are the property map objects. In general, BGL algorithms explicitly pass property map objects for every property that a function will need. The property map interface defines several functions, two of which we use here: get() and put(). The get() function takes a property map object, such as distance and a key object. In the case of the distance property we are using the vertex objects u and v as keys. The get() function then returns the property value for the vertex.
template <class Edge, class Graph,
class WeightPropertyMap,
class DistancePropertyMap>
bool relax(Edge e, const Graph& g,
WeightPropertyMap weight,
DistancePropertyMap distance)
{
typedef typename graph_traits<Graph>::vertex_descriptor Vertex;
Vertex u = source(e,g), v = target(e,g);
if ( get(distance, u) + get(weight, e) < get(distance, v)) {
put(distance, v, get(distance, u) + get(weight, e));
return true;
} else
return false;
}
The function get() returns a copy of the property value. There is a third function in the property map interface, at(), that returns a reference to the property value (a const reference if the map is not mutable).
Similar to the iterator_traits class of the STL, there is a property_traits class that can be used to deduce the types associated with a property map type: the key and value types, and the property map category (which is used to tell whether the map is readable, writeable, or both). In the relax() function we could have used property_traits to declare local variables of the distance property type.
{
typedef typename graph_traits<Graph>::vertex_descriptor Vertex;
Vertex u = source(e,g), v = target(e,g);
typename property_traits<DistancePropertyMap>::value_type
du, dv; // local variables of the distance property type
du = get(distance, u);
dv = get(distance, v);
if (du + get(weight, e) < dv) {
put(distance, v, du + get(weight, e));
return true;
} else
return false;
}
There are two kinds of graph properties: interior and exterior:
- Interior Properties
- are stored inside the graph object in some way, and the lifetime of the property value objects is the same as that of the graph object.
- Exterior Properties
- are stored outside of the graph object and the lifetime of the property value objects is independent of the graph. This is useful for properties that are only needed temporarily, perhaps for the duration of a particular algorithm such as the color property used in breadth_first_search(). When using exterior properties with a BGL algorithm a property map object for the exterior property must be passed as an argument to the algorithm.
Interior Properties
A graph type that supports interior property storage (such as adjacency_list) provides access to its property map objects through the interface defined in PropertyGraph. There is a function get(Property, g) that get property map objects from a graph. The first argument is the property type to specify which property you want to access and the second argument is the graph object. A graph type must document which properties (and therefore tags) it provides access to. The type of the property map depends on the type of graph and the property being mapped. A trait class is defined that provides a generic way to deduce the property map type: property_map. The following code shows how one can obtain the property map for the distance and weight properties of some graph type.
property_map<Graph, vertex_distance_t>::type d
= get(vertex_distance, g);
property_map<Graph, edge_weight_t>::type w
= get(edge_weight, g);
In general, the BGL algorithms require all property maps needed by the algorithm to be explicitly passed to the algorithm. For example, the BGL Dijkstra's shortest paths algorithm requires four property maps: distance, weight, color, and vertex ID.
Often times some or all of the properties will be interior to the graph, so one would call Dijkstra's algorithm in the following way (given some graph g and source vertex src).
dijkstra_shortest_paths(g, src, distance_map(get(vertex_distance, g)).
weight_map(get(edge_weight, g)).
color_map(get(vertex_color, g)).
vertex_index_map(get(vertex_index, g)));
Since it is somewhat cumbersome to specify all of the property maps, BGL provides defaults that assume some of the properties are interior and can be accessed via get(Property, g) from the graph, or if the property map is only used internally, then the algorithm will create a property map for itself out of an array and using the graph's vertex index map as the offset into the array. Below we show a call to dijkstra_shortest_paths algorithm using all defaults for the named parameters. This call is equivalent to the previous call to Dijkstra's algorithm.
dijkstra_shortest_paths(g, src);
The next question is: how do interior properties become attached to a graph object in the first place? This depends on the graph class that you are using. The adjacency_list graph class of BGL uses a property mechanism (see Section Internal Properties) to allow an arbitrary number of properties to be stored on the edges and vertices of the graph.
Exterior Properties
In this section we will describe two methods for constructing exterior property maps, however there is an unlimited number of ways that one could create exterior properties for a graph.
The first method uses the adaptor class iterator_property_map. This class wraps a random access iterator, creating a property map out of it. The random access iterator must point to the beginning of a range of property values, and the length of the range must be the number of vertices or edges in the graph (depending on whether it is a vertex or edge property map). The adaptor must also be supplied with an ID property map, which will be used to map the vertex or edge descriptor to the offset of the property value (offset from the random access iterator). The ID property map will typically be an interior property map of the graph. The following example shows how the iterator_property_map can be used to create exterior property maps for the capacity and flow properties, which are stored in arrays. The arrays are indexed by edge ID. The edge ID is added to the graph using a property, and the values of the ID's are given when each edge is added to the graph. The complete source code for this example is in example/exterior_edge_properties.cpp. The print_network() function prints out the graph with the flow and capacity values.
typedef adjacency_list<vecS, vecS, bidirectionalS,
no_property, property<edge_index_t, std::size_t> > Graph;
const int num_vertices = 9;
Graph G(num_vertices);
int capacity_array[] = { 10, 20, 20, 20, 40, 40, 20, 20, 20, 10 };
int flow_array[] = { 8, 12, 12, 12, 12, 12, 16, 16, 16, 8 };
// Add edges to the graph, and assign each edge an ID number.
add_edge(0, 1, 0, G);
// ...
typedef graph_traits<Graph>::edge_descriptor Edge;
typedef property_map<Graph, edge_index_t>::type EdgeID_Map;
EdgeID_Map edge_id = get(edge_index, G);
iterator_property_map
<int*, int, int&, EdgeID_Map>
capacity(capacity_array, edge_id),
flow(flow_array, edge_id);
print_network(G, capacity, flow);
The second method uses a pointer type (a pointer to an array of property values) as a property map. This requires the key type to be an integer so that it can be used as an offset to the pointer. The adjacency_list class with template parameter VertexList=vecS uses integers for vertex descriptors (indexed from zero to the number of vertices in the graph), so they are suitable as the key type for a pointer property map. When the VertexList is not vecS, then the vertex descriptor is not an integer, and cannot be used with a pointer property map. Instead the method described above of using a iterator_property_map with an ID property must be used. The edge_list class may also use an integer type for the vertex descriptor, depending on how the adapted edge iterator is defined. The example in example/bellman_ford.cpp shows edge_list being used with pointers as vertex property maps.
The reason that pointers can be used as property maps is that there are several overloaded functions and a specialization of property_traits in the header boost/property_map/property_map.hpp that implement the property map interface in terms of pointers. The definition of those functions is listed here.
namespace boost {
template <class T>
struct property_traits<T*> {
typedef T value_type;
typedef ptrdiff_t key_type;
typedef lvalue_property_map_tag category;
};
template <class T>
void put(T* pa, std::ptrdiff_t key, const T& value) { pa[key] = value; }
template <class T>
const T& get(const T* pa, std::ptrdiff_t key) { return pa[key]; }
template <class T>
const T& at(const T* pa, std::ptrdiff_t key) { return pa[key]; }
template <class T>
T& at(T* pa, std::ptrdiff_t key) { return pa[key]; }
}
In the following example, we use an array to store names of cities for each vertex in the graph, and a std::vector to store vertex colors which will be needed in a call to breadth_first_search(). Since the iterator of a std::vector (obtained with a call to begin()) is a pointer, the pointer property map method also works for std::vector::iterator. The complete source code for this example is in example/city_visitor.cpp.
// Definition of city_visitor omitted...
int main(int,char*[])
{
enum { SanJose, SanFran, LA, SanDiego, Fresno, LosVegas, Reno,
Sacramento, SaltLake, Pheonix, N };
// An array of vertex name properties
std::string names[] = { "San Jose", "San Francisco", "San Jose",
"San Francisco", "Los Angeles", "San Diego",
"Fresno", "Los Vegas", "Reno", "Sacramento",
"Salt Lake City", "Pheonix" };
// Specify all the connecting roads between cities.
typedef std::pair<int,int> E;
E edge_array[] = { E(Sacramento, Reno), ... };
// Specify the graph type.
typedef adjacency_list<vecS, vecS, undirectedS> Graph;
// Create the graph object, based on the edges in edge_array.
Graph G(N, edge_array, edge_array + sizeof(edge_array)/sizeof(E));
// DFS and BFS need to "color" the vertices.
// Here we use std::vector as exterior property storage.
std::vector<default_color_type> colors(N);
cout << "*** Depth First ***" << endl;
depth_first_search(G, city_visitor(names), colors.begin());
cout << endl;
// Get the source vertex
boost::graph_traits<Graph>::vertex_descriptor
s = vertex(SanJose, G);
cout << "*** Breadth First ***" << endl;
breadth_first_search(G, s, city_visitor(names), colors.begin());
return 0;
}
Constructing an Exterior Property Map
Implementing your own exterior property maps is not very difficult. You simply need to overload the functions required by the property map concept that you want your class to model. At most, this means overloading the put() and get() functions and implementing operator[]. Also, your property map class will need to have nested typedefs for all the types defined in property_traits, or you can create a specialization of property_traits for your new property map type.
The implementation of the iterator_property_map class serves as a good example for how to build and exterior property map. Here we present a simplified implementation of the iterator_property_map class which we will name iterator_pa.
We start with the definition of the iterator_map class itself. This adaptor class is templated on the adapted Iterator type and the ID property map. The job of the ID property map is to map the key object (which will typically be a vertex or edge descriptor) to an integer offset. The iterator_map class will need the three necessary typedefs for a property map: key_type, value_type, and category. We can use property_traits to find the key type of IDMap, and we can use iterator_traits to determine the value type of Iterator. We choose boost::lvalue_property_map_tag for the category since we plan on implementing the at() function.
template <class Iterator, class IDMap>
class iterator_map
{
public:
typedef typename boost::property_traits<IDMap>::key_type key_type;
typedef typename std::iterator_traits<Iterator>::value_type value_type;
typedef boost::lvalue_property_map_tag category;
iterator_map(Iterator i = Iterator(),
const IDMap& id = IDMap())
: m_iter(i), m_id(id) { }
Iterator m_iter;
IDMap m_id;
};
Next we implement the three property map functions, get(), put(), and at(). In each of the functions, the key object is converted to an integer offset using the m_id property map, and then that is used as an offset to the random access iterator m_iter.
template <class Iter, class ID>
typename std::iterator_traits<Iter>::value_type
get(const iterator_map<Iter,ID>& i,
typename boost::property_traits<ID>::key_type key)
{
return i.m_iter[i.m_id[key]];
}
template <class Iter, class ID>
void
put(const iterator_map<Iter,ID>& i,
typename boost::property_traits<ID>::key_type key,
const typename std::iterator_traits<Iter>::value_type& value)
{
i.m_iter[i.m_id[key]] = value;
}
template <class Iter, class ID>
typename std::iterator_traits<Iter>::reference
at(const iterator_map<Iter,ID>& i,
typename boost::property_traits<ID>::key_type key)
{
return i.m_iter[i.m_id[key]];
}
That is it. The iterator_map class is complete and could be used just like the iterator_property_map in the previous section.